2. 线性代数#
2.1. 概述#
线性代数是经济学家最值得投入学习的应用数学分支之一。
例如,经济学和金融学中的许多应用问题都需要求解线性方程组,比如
或者更一般地,
这里的目标是在已知 \(a_{11}, \ldots, a_{nk}\) 和 \(y_1, \ldots, y_n\) 的情况下,求解”未知数” \(x_1, \ldots, x_k\)。
在研究这类问题时,我们需要考虑以下几个基本问题:
这个方程组是否有解?
如果有解,解是唯一的吗?如果有多个解,这意味着什么?
如果没有精确解,是否可以找到一个最优的近似解?
如果解存在,有什么有效的方法可以求出它?
这些都是线性代数所要解决的问题。
本讲将介绍线性代数和矩阵运算的基础知识。
我们将同时关注理论基础和实际计算。
虽然本讲与我们在之前的讲座中已经介绍过NumPy数组的基本操作有所重合,但这里我们将从更理论的角度来探讨线性代数。
这些理论知识将为我们后续的应用打下重要基础。
import matplotlib.pyplot as plt
import matplotlib as mpl
FONTPATH = "fonts/SourceHanSerifSC-SemiBold.otf"
mpl.font_manager.fontManager.addfont(FONTPATH)
plt.rcParams['font.family'] = ['Source Han Serif SC']
plt.rcParams["figure.figsize"] = (11, 5) #设置默认图形大小
import numpy as np
from matplotlib import cm
from mpl_toolkits.mplot3d import Axes3D
from scipy.linalg import inv, solve, det, eig
2.2. 向量#
长度为\(n\)的向量就是一个由\(n\)个数字组成的序列(或数组、元组),我们将其写作\(x = (x_1, \ldots, x_n)\)或\(x = [x_1, \ldots, x_n]\)。
我们可以根据需要将这些序列横向或纵向书写。
(在后面讨论矩阵运算时,区分横向和纵向表示将变得很重要)
我们用\(\mathbb R^n\)表示所有\(n\)维向量的集合。
以\(\mathbb R^2\)为例,它代表二维平面,其中的每个向量都对应平面上的一个点。
在几何上,我们通常将向量画成一个从原点出发的箭头。
让我们看看下面这个例子,其中画出了三个不同的向量:
fig, ax = plt.subplots(figsize=(10, 8))
# 设置通过原点的轴
for spine in ['left', 'bottom']:
ax.spines[spine].set_position('zero')
for spine in ['right', 'top']:
ax.spines[spine].set_color('none')
ax.set(xlim=(-5, 5), ylim=(-5, 5))
ax.grid()
vecs = ((2, 4), (-3, 3), (-4, -3.5))
for v in vecs:
ax.annotate('', xy=v, xytext=(0, 0),
arrowprops=dict(facecolor='blue',
shrink=0,
alpha=0.7,
width=0.5))
ax.text(1.1 * v[0], 1.1 * v[1], str(v))
plt.show()

2.2.1. 向量运算#
向量最常见的两种运算是加法和标量乘法,下面我们来介绍。
根据定义,当我们对两个向量进行加法运算时,我们是按元素逐个相加
标量乘法是一种将数字 \(\gamma\) 与向量 \(x\) 相乘的运算,得到
下图展示了标量乘法
fig, ax = plt.subplots(figsize=(10, 8))
# Set the axes through the origin
for spine in ['left', 'bottom']:
ax.spines[spine].set_position('zero')
for spine in ['right', 'top']:
ax.spines[spine].set_color('none')
ax.set(xlim=(-5, 5), ylim=(-5, 5))
x = (2, 2)
ax.annotate('', xy=x, xytext=(0, 0),
arrowprops=dict(facecolor='blue',
shrink=0,
alpha=1,
width=0.5))
ax.text(x[0] + 0.4, x[1] - 0.2, '$x$', fontsize='16')
scalars = (-2, 2)
x = np.array(x)
for s in scalars:
v = s * x
ax.annotate('', xy=v, xytext=(0, 0),
arrowprops=dict(facecolor='red',
shrink=0,
alpha=0.5,
width=0.5))
ax.text(v[0] + 0.4, v[1] - 0.2, f'${s} x$', fontsize='16')
plt.show()

在Python中,向量可以用列表或元组来表示,例如 x = (2, 4, 6),但更常见的是用NumPy数组来表示。
NumPy数组的一个优点是标量乘法和加法具有非常自然的语法
x = np.ones(3) # 创建一个包含三个1的向量
y = np.array((2, 4, 6)) # 将元组(2, 4, 6)转换为数组
x + y
array([3., 5., 7.])
4 * x
array([4., 4., 4.])
2.2.2. 内积和范数#
向量 \(x,y \in \mathbb R ^n\) 的内积定义为
如果两个向量的内积为零,则称这两个向量正交。
向量 \(x\) 的范数表示其”长度”(即其与零向量的距离),定义为
表达式 \(\| x - y\|\) 被理解为 \(x\) 和 \(y\) 之间的距离。
继续前面的例子,内积和范数可以按如下方式计算
np.sum(x * y) # x和y的内积
np.float64(12.0)
np.sqrt(np.sum(x**2)) # x的范数,第一种方法
np.float64(1.7320508075688772)
np.linalg.norm(x) # x的范数,第二次计算
np.float64(1.7320508075688772)
2.2.3. 张成空间#
给定\(\mathbb R ^n\)中的一组向量\(A := \{a_1, \ldots, a_k\}\),我们自然会思考通过执行线性运算可以创建哪些新向量。
以这种方式创建的新向量被称为\(A\)的线性组合。
具体来说,如果\(y \in \mathbb R ^n\)是\(A := \{a_1, \ldots, a_k\}\)的线性组合,那么
在这种情况下,值\(\beta_1, \ldots, \beta_k\)被称为线性组合的系数。
\(A\)的所有线性组合构成的集合被称为\(A\)的张成空间。
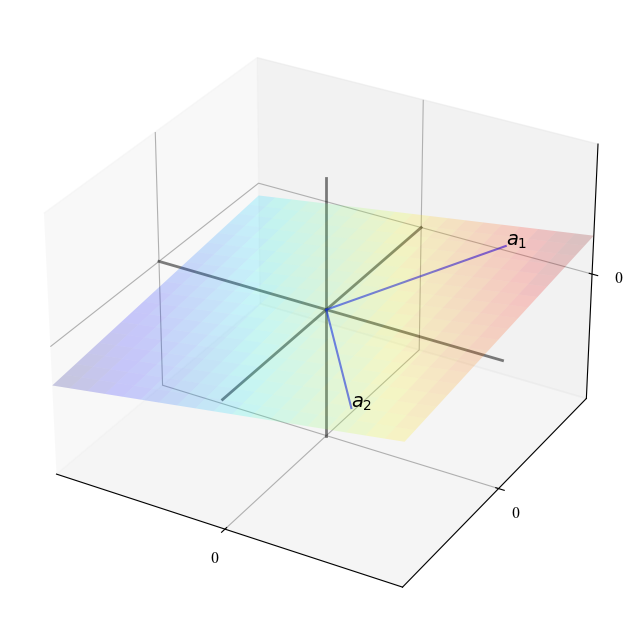
下图显示了\(\mathbb R ^3\)中\(A = \{a_1, a_2\}\)的张成空间。
张成空间是一个通过这两个点和原点的二维平面。
ax = plt.figure(figsize=(10, 8)).add_subplot(projection='3d')
x_min, x_max = -5, 5
y_min, y_max = -5, 5
α, β = 0.2, 0.1
ax.set(xlim=(x_min, x_max), ylim=(x_min, x_max), zlim=(x_min, x_max),
xticks=(0,), yticks=(0,), zticks=(0,))
gs = 3
z = np.linspace(x_min, x_max, gs)
x = np.zeros(gs)
y = np.zeros(gs)
ax.plot(x, y, z, 'k-', lw=2, alpha=0.5)
ax.plot(z, x, y, 'k-', lw=2, alpha=0.5)
ax.plot(y, z, x, 'k-', lw=2, alpha=0.5)
# 固定线性函数,生成平面
def f(x, y):
return α * x + β * y
# 向量位置,按坐标
x_coords = np.array((3, 3))
y_coords = np.array((4, -4))
z = f(x_coords, y_coords)
for i in (0, 1):
ax.text(x_coords[i], y_coords[i], z[i], f'$a_{i+1}$', fontsize=14)
# 连接向量的线
for i in (0, 1):
x = (0, x_coords[i])
y = (0, y_coords[i])
z = (0, f(x_coords[i], y_coords[i]))
ax.plot(x, y, z, 'b-', lw=1.5, alpha=0.6)
# 绘制平面
grid_size = 20
xr2 = np.linspace(x_min, x_max, grid_size)
yr2 = np.linspace(y_min, y_max, grid_size)
x2, y2 = np.meshgrid(xr2, yr2)
z2 = f(x2, y2)
ax.plot_surface(x2, y2, z2, rstride=1, cstride=1, cmap=cm.jet,
linewidth=0, antialiased=True, alpha=0.2)
plt.show()
2.2.3.1. 示例#
如果 \(A\) 只包含一个向量 \(a_1 \in \mathbb R ^2\),那么它的张成空间只是 \(a_1\) 的标量倍数,即通过 \(a_1\) 和原点的唯一直线。
如果 \(A = \{e_1, e_2, e_3\}\) 由 \(\mathbb R ^3\) 的标准基向量组成,即
那么 \(A\) 的张成就是整个 \(\mathbb R^3\),因为对于任意的 \(x = (x_1, x_2, x_3) \in \mathbb R^3\),我们可以写成
现在考虑 \(A_0 = \{e_1, e_2, e_1 + e_2\}\)。
如果 \(y = (y_1, y_2, y_3)\) 是这些向量的任意线性组合,那么 \(y_3 = 0\)(请验证)。
因此 \(A_0\) 不能张成整个 \(\mathbb R ^3\)。
2.2.4. 线性无关#
在实际应用中,我们经常需要找到一组能够张成较大空间的向量。这样做的好处是,我们可以用这少数几个向量的线性组合来表示更多的向量。
要使一组向量能张成较大的空间,这组向量需要满足一个重要条件 – 线性无关。
具体来说,在\(\mathbb R ^n\)中的一组向量\(A := \{a_1, \ldots, a_k\}\)被称为
线性相关的,如果集合中至少有一个向量可以表示为其他向量的线性组合。
线性无关的,如果集合中任何一个向量都不能表示为其他向量的线性组合。
这个概念可以通过一个简单的例子来理解。
让我们回到图示中的例子,其中\(\mathbb R ^3\)中的两个向量\(\{a_1, a_2\}\)张成了一个经过原点的平面。
如果我们添加第三个向量\(a_3\),那么新的集合\(\{a_1, a_2, a_3\}\)的性质将取决于\(a_3\)的位置:
如果\(a_3\)落在\(a_1\)和\(a_2\)张成的平面上,那么\(a_3\)可以表示为\(a_1\)和\(a_2\)的线性组合,因此这三个向量是线性相关的
如果\(a_3\)不在该平面上,那么它不能表示为\(a_1\)和\(a_2\)的线性组合,因此这三个向量是线性无关的
一个重要的性质是:在\(\mathbb R ^n\)中,任何超过\(n\)个向量的集合必定是线性相关的。这是因为\(\mathbb R ^n\)最多需要\(n\)个向量就能完全张成(就像我们之前看到的标准基向量那样)。
数学上,向量集合\(A := \{a_1, \ldots, a_k\} \subset \mathbb R ^n\)的线性无关性可以用以下两种等价方式来表述:
集合中的任何向量都不能写成其他向量的线性组合。
当且仅当所有系数\(\beta_1, \ldots, \beta_k\)都为零时,线性组合\(\beta_1 a_1 + \cdots + \beta_k a_k\)等于零向量。
(这里的零向量指的是\(\mathbb R ^n\)中所有分量都是0的向量)
2.2.5. 唯一表示#
线性独立向量集合的一个重要性质是唯一表示性:其张成空间中的每个向量都可以用唯一的一组系数来表示。
具体来说,假设\(A := \{a_1, \ldots, a_k\} \subset \mathbb R ^n\)是线性独立的,且向量\(y\)可以表示为:
那么这组系数\(\beta_1, \ldots, \beta_k\)是唯一的。
也就是说,不存在另一组不同的系数\(\gamma_1, \ldots, \gamma_k\)使得:
这一点可以通过反证法证明。如果存在这样两组不同的系数,那么:
由线性独立性可知,这种情况只可能在\(\beta_i = \gamma_i\) \((i=1,\ldots,k)\)时发生。
这与我们假设两组系数不同相矛盾。
2.3. 矩阵#
矩阵是组织数据用于线性运算的一种简洁方式。
一个 \(n \times k\) 矩阵是一个具有 \(n\) 行和 \(k\) 列的矩形数字数组 \(A\):
通常,矩阵中的数字表示线性方程组中的系数,正如本讲开始时所讨论的。
显然,当 \(n = 1\) 或 \(k = 1\) 时,矩阵 \(A\) 也被称为向量。
在前一种情况下,\(A\) 被称为行向量,而在后一种情况下被称为列向量。
如果 \(n = k\),则 \(A\) 被称为方阵。
将每个 \(a_{ij}\) 替换为 \(a_{ji}\) 所形成的矩阵被称为 \(A\) 的转置,记作 \(A'\) 或 \(A^{\top}\)。
如果 \(A = A'\),则 \(A\) 被称为对称矩阵。
对于方阵 \(A\),形如 \(a_{ii}\) 的 \(i\) 个元素(其中 \(i=1,\ldots,n\))被称为主对角线。
如果只有主对角线上的元素非零,则 \(A\) 被称为对角矩阵。
如果除了是对角矩阵外,主对角线上的每个元素都等于1,则 \(A\) 被称为单位矩阵,记作 \(I\)。
2.3.1. 矩阵运算#
与向量一样,矩阵也定义了许多代数运算。
标量乘法和加法是向量情况的直接推广:
以及
在后一种情况下,矩阵必须具有相同的形状才能使定义有意义。
我们还有一个相乘两个矩阵的约定。
矩阵乘法的规则推广了上面讨论的内积的概念。
并且其设计使得乘法能够很好地配合基本线性运算。
如果\(A\)和\(B\)是两个矩阵,那么它们的乘积\(A B\)的第\(i,j\)个元素是由\(A\)的第\(i\)行与\(B\)的第\(j\)列的内积得到的。
如果\(A\)是\(n \times k\)矩阵,\(B\)是\(j \times m\)矩阵,那么要使\(A\)和\(B\)可以相乘,我们需要\(k = j\),且得到的矩阵\(A B\)是\(n \times m\)的。
作为可能最重要的特例,考虑将\(n \times k\)矩阵\(A\)与\(k \times 1\)列向量\(x\)相乘。
根据前面的规则,这会得到一个\(n \times 1\)列向量
备注
矩阵乘法不满足交换律,也就是说,\(A B\) 和 \(B A\) 的结果通常是不同的。
另一个重要的特殊情况是单位矩阵。
你应该验证如果 \(A\) 是 \(n \times k\) 矩阵且 \(I\) 是 \(k \times k\) 单位矩阵,那么 \(AI = A\)。
如果 \(I\) 是 \(n \times n\) 单位矩阵,那么 \(IA = A\)。
2.3.2. NumPy中的矩阵#
NumPy数组也被用作矩阵,并且对所有标准矩阵运算都有快速、高效的函数和方法[1]。
你可以通过元组的元组(或列表的列表)手动创建它们,如下所示
A = ((1, 2),
(3, 4))
type(A)
tuple
A = np.array(A)
type(A)
numpy.ndarray
A.shape
(2, 2)
shape 属性是一个表示行数和列数的元组 — 更多讨论请参见这里。
要获取 A 的转置,可以使用 A.transpose() 或更简单的 A.T。
有许多便捷的函数可用于创建常见矩阵(零矩阵、全1矩阵等)— 参见这里。
由于运算默认按元素执行,标量乘法和加法的语法具有非常自然
A = np.identity(3)
B = np.ones((3, 3))
2 * A
array([[2., 0., 0.],
[0., 2., 0.],
[0., 0., 2.]])
A + B
array([[2., 1., 1.],
[1., 2., 1.],
[1., 1., 2.]])
矩阵相乘我们使用@符号。
具体来说,A @ B表示矩阵乘法,而A * B表示元素逐个相乘。
更多讨论请参见这里。
2.3.3. 矩阵作为映射#
每个\(n \times k\)矩阵\(A\)都可以被视为一个函数\(f(x) = Ax\),该函数将\(x \in \mathbb R ^k\)映射到\(y = Ax \in \mathbb R ^n\)。
这类函数具有一个特殊性质:它们是线性的。
如果对于所有的\(x, y \in \mathbb R ^k\)和所有标量\(\alpha, \beta\),一个函数\(f \colon \mathbb R ^k \to \mathbb R ^n\)满足:
则称该函数为线性函数。
你可以验证,当\(b\)为零向量时,函数\(f(x) = A x + b\)满足这个性质,而当\(b\)非零时则不满足。
事实上我们知道,\(f\)是线性的当且仅当存在矩阵\(A\)使得对所有的\(x\)都有\(f(x) = Ax\)。
2.4. 求解方程组#
再次回顾方程组(2.1)。
如果我们比较(2.1)和(2.2),我们可以看到(2.1)现在可以更方便地写成
我们面临的问题是确定一个向量\(x \in \mathbb R ^k\)来解(2.3),其中\(y\)和\(A\)是已知的。
这是一个更一般问题的特例:找到一个\(x\)使得\(y = f(x)\)。
给定任意函数\(f\)和一个\(y\),是否总是存在一个\(x\)使得\(y = f(x)\)?
如果存在,它是否总是唯一的?
这两个问题的答案都是否定的,如下图所示
def f(x):
return 0.6 * np.cos(4 * x) + 1.4
xmin, xmax = -1, 1
x = np.linspace(xmin, xmax, 160)
y = f(x)
ya, yb = np.min(y), np.max(y)
fig, axes = plt.subplots(2, 1, figsize=(10, 10))
for ax in axes:
# Set the axes through the origin
for spine in ['left', 'bottom']:
ax.spines[spine].set_position('zero')
for spine in ['right', 'top']:
ax.spines[spine].set_color('none')
ax.set(ylim=(-0.6, 3.2), xlim=(xmin, xmax),
yticks=(), xticks=())
ax.plot(x, y, 'k-', lw=2, label='$f$')
ax.fill_between(x, ya, yb, facecolor='blue', alpha=0.05)
ax.vlines([0], ya, yb, lw=3, color='blue', label='$f$的值域')
ax.text(0.04, -0.3, '$0$', fontsize=16)
ax = axes[0]
ax.legend(loc='upper right', frameon=False)
ybar = 1.5
ax.plot(x, x * 0 + ybar, 'k--', alpha=0.5)
ax.text(0.05, 0.8 * ybar, '$y$', fontsize=16)
for i, z in enumerate((-0.35, 0.35)):
ax.vlines(z, 0, f(z), linestyle='--', alpha=0.5)
ax.text(z, -0.2, f'$x_{i}$', fontsize=16)
ax = axes[1]
ybar = 2.6
ax.plot(x, x * 0 + ybar, 'k--', alpha=0.5)
ax.text(0.04, 0.91 * ybar, '$y$', fontsize=16)
plt.show()
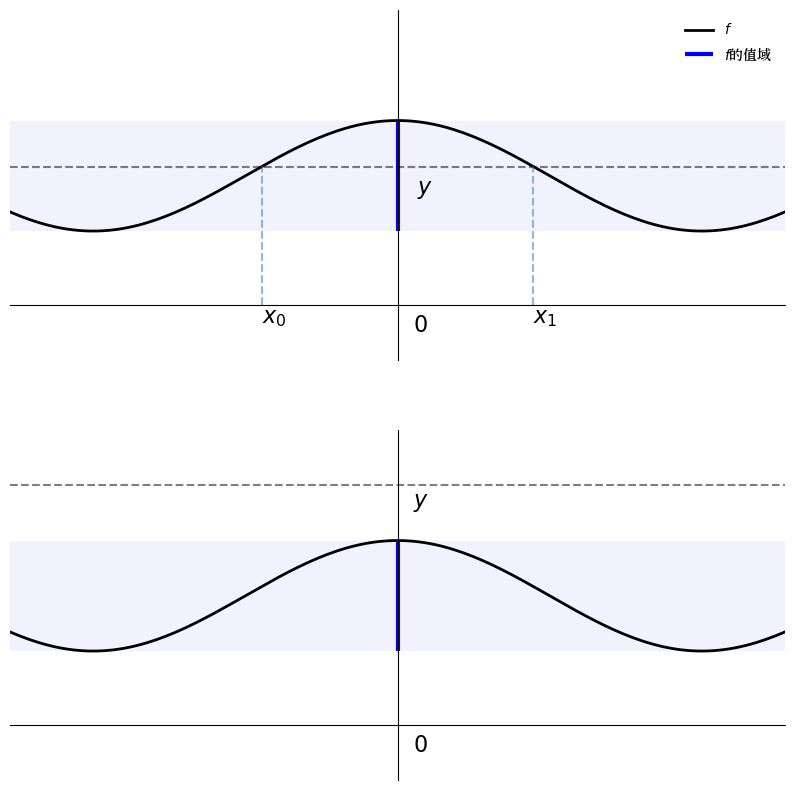
在第一个图中,由于函数不是一一对应的,存在多个解,而 在第二个图中,由于\(y\)在函数\(f\)的值域之外,所以没有解。
我们能否对(2.3)中的\(A\)施加条件来避免这些问题?
在这种情况下,最重要的是要认识到表达式\(Ax\)对应于\(A\)的列的线性组合。
具体来说,如果\(a_1, \ldots, a_k\)是\(A\)的列,那么
因此,\(f(x) = Ax\)的值域恰好是\(A\)的列的张成空间。
我们希望值域足够大,以包含任意的\(y\)。
你可能记得,我们希望张成空间足够大的条件是线性独立。
一个令人高兴的事实是,\(A\)的列的线性独立性也能给我们唯一性。
确实,根据我们之前的讨论,如果\(\{a_1, \ldots, a_k\}\)是线性无关的,且\(y = Ax = x_1 a_1 + \cdots + x_k a_k\),那么不存在\(z \not= x\)满足\(y = Az\)。
2.4.1. 方阵的情况#
让我们讨论更多细节,首先从\(A\)是\(n \times n\)矩阵的情况开始。
这是我们熟悉的方程个数等于未知数个数的情况。
对于任意的\(y \in \mathbb R ^n\),我们希望找到唯一的\(x \in \mathbb R ^n\)使得\(y = Ax\)。
根据上面的观察,如果\(A\)的列向量是线性无关的,那么它们的张成空间,也就是函数\(f(x) = Ax\)的值域,就是整个\(\mathbb R ^n\)。
因此总是存在\(x\)使得\(y = Ax\)。
而且,这个解是唯一的。
特别地,以下陈述是等价的:
\(A\)的列向量是线性无关的。
对于任意\(y \in \mathbb R ^n\),方程\(y = Ax\)有唯一解。
列向量线性独立的性质有时被表述为具有满秩列。
2.4.1.1. 逆矩阵#
我们能给出某种形式的解吗?
如果\(y\)和\(A\)是标量且\(A \not= 0\),那么解为\(x = A^{-1} y\)。
在矩阵的情况下也有类似的表达式。
特别地,如果方阵\(A\)具有满秩列,那么它就有一个乘法逆矩阵\(A^{-1}\),具有性质\(A A^{-1} = A^{-1} A = I\)。
因此,如果我们用\(A^{-1}\)左乘等式\(y = Ax\)的两边,就得到\(x = A^{-1} y\)。
这就是我们要找的解。
2.4.1.2. 行列式#
每个方阵都有一个与之唯一对应的数值,这个数值被称为矩阵的行列式。行列式的具体计算方法可以在这里找到。
如果矩阵\(A\)的行列式不为零,我们就说\(A\)是非奇异的。
关于行列式最重要的事实可能是:\(A\)是非奇异的,当且仅当\(A\)具有满列秩。
这为我们提供了一个有用的单一数值,用来概括一个方阵是否可逆。
2.4.2. 行数多于列数#
这是\(n \times k\)的情况,其中\(n > k\)。
这种情况在许多场合都非常重要,尤其是在线性回归中(其中\(n\)是观测数量,\(k\)是解释变量的数量)。
对于任意的\(y \in \mathbb R ^n\),我们寻找一个\(x \in \mathbb R ^k\)使得\(y = Ax\)。
在这种情况下,解的存在性是极不可能的。
在不失一般性的情况下,让我们着重讨论\(A\)的列向量线性独立的情况。
由此可知,\(A\)的列向量张成的空间是\(\mathbb R ^n\)中的一个\(k\)维子空间。
这个张成空间不太”可能”包含任意的 \(y \in \mathbb R ^n\)。
要理解原因,请回顾上图,其中 \(k=2\) 且 \(n=3\)。
想象一个任意选择的 \(y \in \mathbb R ^3\),位于这个三维空间中的某处。
\(y\) 落在 \(\{a_1, a_2\}\) 的张成空间中(即通过这些点的二维平面)的可能性有多大?
从某种意义上说,这个可能性一定很小,因为这个平面的”厚度”为零。
因此,在 \(n > k\) 的情况下,我们通常会放弃寻求精确解。
然而,我们仍然可以寻求最佳近似解,例如,找到一个使距离 \(\| y - Ax\|\) 尽可能小的 \(x\)。
要解决这个问题,可以使用微积分或正交投影理论。
解为 \(\hat x = (A'A)^{-1}A'y\) — 参见这些笔记的第3章。
2.4.3. 列数多于行数#
这是 \(n \times k\) 的情况,其中 \(n < k\),所以方程数少于未知数。
在这种情况下,要么没有解,要么有无穷多个解 — 换句话说,解永远不会是唯一的。
例如,考虑 \(k=3\) 且 \(n=2\) 的情况。
因此,\(A\) 的列由 \(\mathbb R ^2\) 中的3个向量组成。
这组向量永远不可能线性独立,因为可以找到两个向量就能张成 \(\mathbb R ^2\)。
(例如,使用标准基向量)
由此可知,其中一列是其他两列的线性组合。
例如,假设 \(a_1 = \alpha a_2 + \beta a_3\)。
那么如果 \(y = Ax = x_1 a_1 + x_2 a_2 + x_3 a_3\),我们也可以写成
换句话说,解不具有唯一性。
2.4.4. 使用SciPy求解线性方程#
下面展示如何使用SciPy的linalg子模块求解线性方程。
所有这些程序都是经过时间检验和高度优化的FORTRAN代码的Python前端接口
A = ((1, 2), (3, 4))
A = np.array(A)
y = np.ones((2, 1)) # 列向量
det(A) # 检查A是非奇异的,因此是可逆的
np.float64(-2.0)
A_inv = inv(A) # 计算逆矩阵
A_inv
array([[-2. , 1. ],
[ 1.5, -0.5]])
x = A_inv @ y # 解
A @ x # 应该等于y
array([[1.],
[1.]])
solve(A, y) # 产生相同的解
array([[-1.],
[ 1.]])
我们可以通过两种方式求解线性方程\(x = A^{-1}y\):
使用
inv(A) @ y显式计算逆矩阵使用
solve(A, y)直接求解方程
第二种方法基于LU分解,数值稳定性更好,是更推荐的方法。
如果需要求解最小二乘问题\(\hat x = (A'A)^{-1}A'y\),可以使用scipy.linalg.lstsq(A, y)。
2.5. 特征值和特征向量#
设\(A\)是一个\(n \times n\)的方阵。
如果\(\lambda\)是一个标量,且\(v\)是\(\mathbb R ^n\)中的非零向量,满足
则我们称\(\lambda\)是\(A\)的特征值,而\(v\)是特征向量。
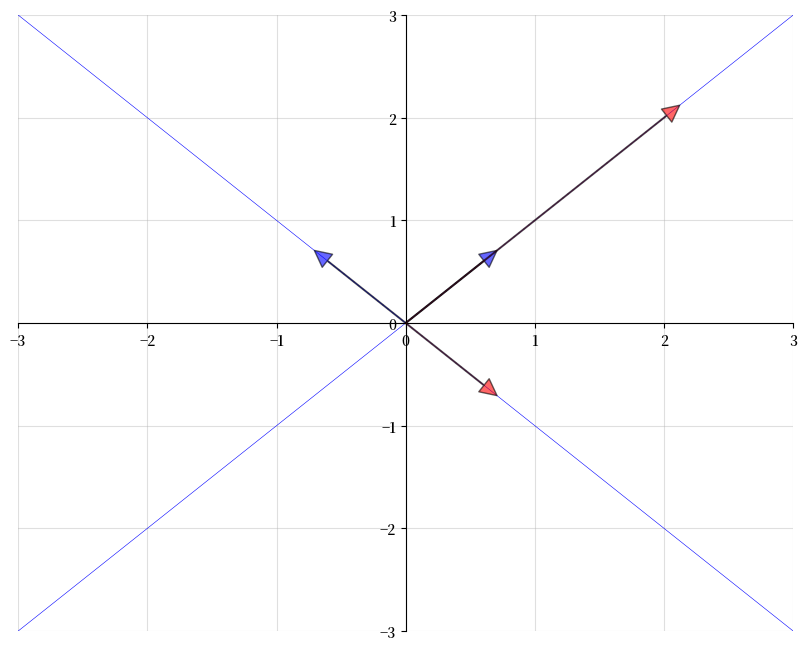
换句话说,特征向量是那些经过线性变换\(f(x) = Ax\)后,方向保持不变、只是长度发生变化的向量。
下图中,蓝色箭头表示两个特征向量,红色箭头表示它们经过变换后的结果。
可以看到,每个特征向量\(v\)经过变换后得到的\(Av\)都与原向量指向相同的方向,只是长度改变了
A = ((1, 2),
(2, 1))
A = np.array(A)
evals, evecs = eig(A)
evecs = evecs[:, 0], evecs[:, 1]
fig, ax = plt.subplots(figsize=(10, 8))
# 设置通过原点的坐标轴
for spine in ['left', 'bottom']:
ax.spines[spine].set_position('zero')
for spine in ['right', 'top']:
ax.spines[spine].set_color('none')
ax.grid(alpha=0.4)
xmin, xmax = -3, 3
ymin, ymax = -3, 3
ax.set(xlim=(xmin, xmax), ylim=(ymin, ymax))
# 绘制每个特征向量
for v in evecs:
ax.annotate('', xy=v, xytext=(0, 0),
arrowprops=dict(facecolor='blue',
shrink=0,
alpha=0.6,
width=0.5))
# 绘制每个特征向量的像
for v in evecs:
v = A @ v
ax.annotate('', xy=v, xytext=(0, 0),
arrowprops=dict(facecolor='red',
shrink=0,
alpha=0.6,
width=0.5))
# 绘制它们所在的直线
x = np.linspace(xmin, xmax, 3)
for v in evecs:
a = v[1] / v[0]
ax.plot(x, a * x, 'b-', lw=0.4)
plt.show()
特征值方程等价于 \((A - \lambda I) v = 0\),只有当 \(A - \lambda I\) 的列向量线性相关时,才存在非零解 \(v\)。
这反过来又等价于行列式为零。
因此,要找到所有特征值,我们可以寻找使 \(A - \lambda I\) 的行列式为零的 \(\lambda\) 值。
这个问题可以表示为求解一个关于 \(\lambda\) 的 \(n\) 次多项式的根。
这进而意味着在复平面上存在 \(n\) 个解,尽管有些可能是重复的。
关于方阵 \(A\) 的特征值,有以下一些重要性质:
\(A\) 的行列式等于所有特征值的乘积。
\(A\) 的迹(主对角线上元素的和)等于所有特征值的和。
如果 \(A\) 是对称矩阵,那么它的所有特征值都是实数。
如果\(A\)是可逆的,且\(\lambda_1, \ldots, \lambda_n\)是它的特征值,那么\(A^{-1}\)的特征值是\(1/\lambda_1, \ldots, 1/\lambda_n\)。
第一个陈述的一个推论是:矩阵可逆当且仅当它的所有特征值都不为零。
使用SciPy,我们可以按如下方式求解矩阵的特征值和特征向量
A = ((1, 2),
(2, 1))
A = np.array(A)
evals, evecs = eig(A)
evals
array([ 3.+0.j, -1.+0.j])
evecs
array([[ 0.70710678, -0.70710678],
[ 0.70710678, 0.70710678]])
注意 evecs 的列是特征向量。
由于特征向量的任意标量倍数都是具有相同特征值的特征向量(可以验证),eig 程序会将每个特征向量的长度归一化为1。
2.5.1. 广义特征值#
有时考虑广义特征值问题很有用,即对给定的矩阵 \(A\) 和 \(B\),寻找广义特征值 \(\lambda\) 和特征向量 \(v\),使得
这可以通过 SciPy 中的 scipy.linalg.eig(A, B) 求解。
当然,如果 \(B\) 是方阵且可逆,我们可以将广义特征值问题转化为普通特征值问题 \(B^{-1} A v = \lambda v\),但情况并非总是如此。
2.6. 进阶概念#
我们通过简要介绍几个其他重要概念来结束讨论。
2.6.1. 级数展开#
回顾几何级数的常用求和公式,即
如果 \(|a| < 1\),那么 \(\sum_{k=0}^{\infty} a^k = (1 - a)^{-1}\)。
这个思想在矩阵环境中有一个推广形式。
2.6.1.1. 矩阵范数#
设 \(A\) 为方阵,定义
右边的范数是普通的向量范数,而左边的范数是矩阵范数——在这种情况下,称为谱范数。
例如,对于方阵 \(S\),条件 \(\| S \| < 1\) 意味着 \(S\) 是压缩的,即它将所有向量拉向原点[2]。
2.6.1.2. 诺伊曼定理#
设 \(A\) 为方阵,令 \(A^k := A A^{k-1}\),其中 \(A^1 := A\)。
换句话说,\(A^k\) 是 \(A\) 的 \(k\) 次幂。
诺伊曼定理指出:如果对某个 \(\| A^k \| < 1\)
\(k \in \mathbb{N}\),则 \(I - A\) 是可逆的,且
2.6.1.3. 谱半径#
Gelfand公式告诉我们,对于任意方阵 \(A\),
这里 \(\rho(A)\) 是谱半径,定义为 \(\max_i |\lambda_i|\),其中 \(\{\lambda_i\}_i\) 是 \(A\) 的特征值集合。
作为Gelfand公式的结果,如果所有特征值的模都严格小于1, 则存在一个 \(k\) 使得 \(\| A^k \| < 1\)。
在这种情况下,(2.4) 是有效的。
2.6.2. 正定矩阵#
设 \(A\) 是一个 \(n \times n\) 对称矩阵。
我们称 \(A\) 是
如果对于每个 \(x \in \mathbb R ^n \setminus \{0\}\),都有 \(x' A x > 0\),则称矩阵为正定的
如果对于每个 \(x \in \mathbb R ^n\),都有 \(x' A x \geq 0\),则称矩阵为半正定的或非负定的
负定和半负定矩阵有类似的定义。
值得注意的是,如果 \(A\) 是正定的,那么它的所有特征值都严格为正,因此 \(A\) 是可逆的(且其逆矩阵也是正定的)。
2.6.3. 线性和二次型的求导#
以下公式在许多经济学场景中都很有用。设
\(z, x\) 和 \(a\) 都是 \(n \times 1\) 向量
\(A\) 是 \(n \times n\) 矩阵
\(B\) 是 \(m \times n\) 矩阵,\(y\) 是 \(m \times 1\) 向量
则
\(\frac{\partial a' x}{\partial x} = a\)
\(\frac{\partial A x}{\partial x} = A'\)
\(\frac{\partial x'A x}{\partial x} = (A + A') x\)
\(\frac{\partial y'B z}{\partial y} = B z\)
\(\frac{\partial y'B z}{\partial B} = y z'\)
下面的练习 2.1要求你应用这些公式。
2.6.4. 延伸阅读#
scipy.linalg子模块的文档可以在这里找到。
计量经济学理论的第2章和第3章包含了与上述内容类似的线性代数讨论,并附有已解答的练习题。
如果你不介意稍微抽象的方法,[Jänich, 1994]是一本不错的中级线性代数教材。
2.7. 练习#
练习 2.1
设\(x\)是一个给定的\(n \times 1\)向量,考虑以下问题
受限于线性约束
其中
\(P\)是一个\(n \times n\)矩阵,\(Q\)是一个\(m \times m\)矩阵
\(A\)是一个\(n \times n\)矩阵,\(B\)是一个\(n \times m\)矩阵
\(P\)和\(Q\)都是对称且半正定的
(\(y\) 和 \(u\) 的维度必须是多少才能使这成为一个合理的问题?)
解决这个问题的一种方法是构建拉格朗日函数
其中 \(\lambda\) 是一个 \(n \times 1\) 的拉格朗日乘子向量。
尝试应用上面给出的关于二次型和线性型求导的公式,得到关于 \(y, u\) 的最大化和关于 \(\lambda\) 的最小化的一阶条件。
证明这些条件意味着:
\(\lambda = - 2 P y\)。
\(u\) 的最优选择满足 \(u = - (Q + B' P B)^{-1} B' P A x\)。
函数 \(v\) 满足 \(v(x) = - x' \tilde P x\),其中 \(\tilde P = A' P A - A'P B (Q + B'P B)^{-1} B' P A\)。
正如我们将看到的,在经济学背景下,拉格朗日乘子通常是影子价格。
备注
如果我们不关心拉格朗日乘数,我们可以将约束条件代入目标函数,然后仅对\(u\)最大化\(-(Ax + Bu)'P (Ax + Bu) - u' Q u\)。你可以验证这会得到相同的最大值。
解答 练习 2.1
我们有一个优化问题:
满足约束条件:
其中基本条件为:
\(P\)是一个对称且半正定的\(n \times n\)矩阵
\(Q\)是一个对称且半正定的\(m \times m\)矩阵
\(A\)是一个\(n \times n\)矩阵
\(B\)是一个\(n \times m\)矩阵
相关的拉格朗日函数是:
第1步:
对拉格朗日方程关于y求导并令其导数等于零得到:
因为P是对称的。
因此,关于y的拉格朗日方程最大化的一阶条件意味着
第2步.
对拉格朗日方程关于u求导并令其导数等于零得到
代入\(\lambda = -2 P y\)得到
将线性约束\(y = Ax + Bu\)代入上式得到
这是关于u的拉格朗日方程最大化的一阶条件。
因此,u的最优选择必须满足
这是由拉格朗日方程的一阶条件定义得出的。
第3步.
将约束代入目标函数,重写我们的问题,得到
由于我们知道u的最优选择满足\(u = -(Q + B'PB)^{-1}B'PAx\),那么
计算函数
为简化起见,令 \(S := (Q + B'PB)^{-1} B'PA\),则 \(u = -Sx\)。
对于第二项 \(- 2u'B'PAx\),
注意到项 \((Q + B'PB)^{-1}\) 是对称的,因为 P 和 Q 都是对称的。
对于第三项 \(- u'(Q + B'PB) u\),
因此,第二项和第三项的和为 \(x'A'PB(Q + B'PB)^{-1}B'PAx\)。
这意味着
因此,优化问题的解 \(v(x) = -x' \tilde{P}x\) 遵循上述结果,其中 \(\tilde{P} := A'PA - A'PB(Q + B'PB)^{-1}B'PA\)